Accomplishment
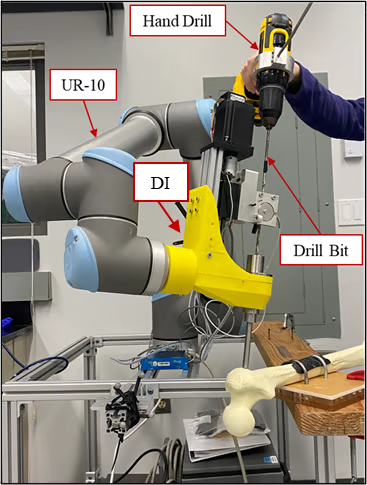
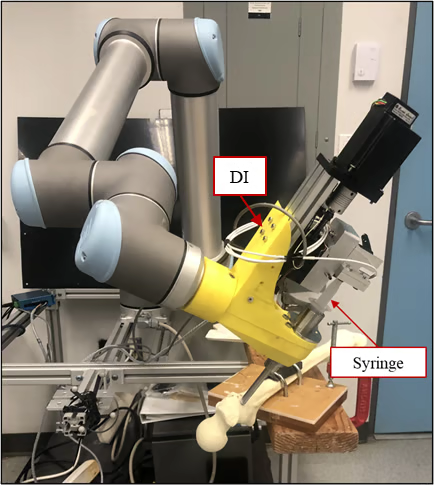
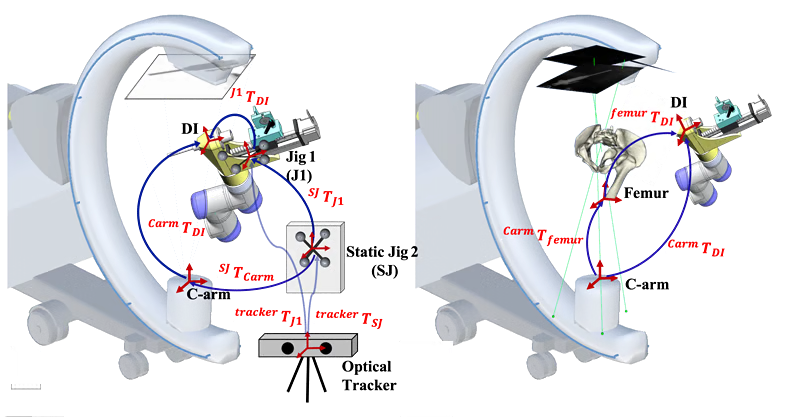
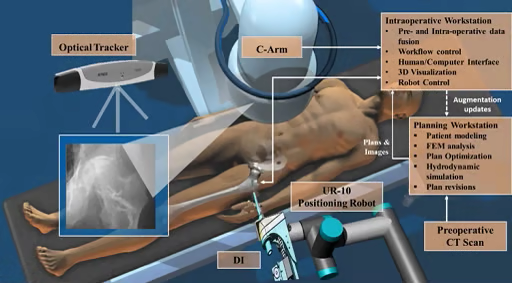
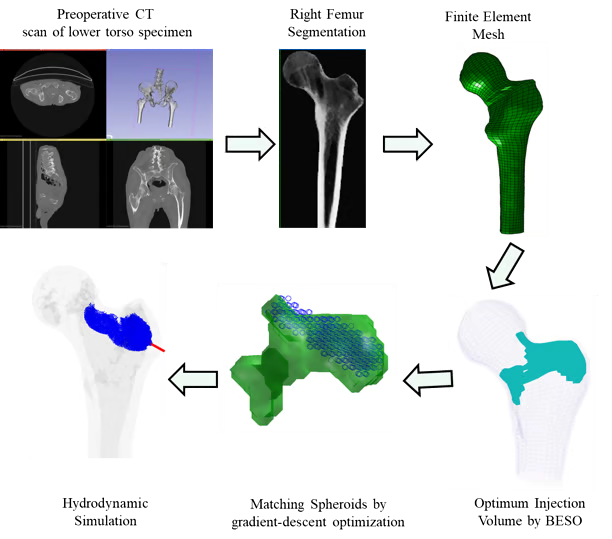
We have developed robot-assisted system for femoral bone augmentation surgery that implements the concept of intraoperative biomechanical feedback. The system consists of surgical biomechanical planning using hydrodynamics-based bone cement diffusion model, surgical navigation involving 2D/3D registration of preoperative CT scans to the augmented hip bone via acquiring X-ray images, real-time tracking, and an intraoperative monitoring system of the cement shape from X-ray images. Current system advancements include designing a drilling and injection component (DI) capable of both bone drilling and controlled injection of the cement, that is attached to the six DOF positioning robot (UR10, Universal Robots Inc.). We evaluated the feasibility of the robotic system with the use of image-based 2D/3D registration through a cadaveric experiment involving soft tissue. Intraoperative fluoroscopic images are taken from multiple views to perform registration of the femur and DI. Our evaluation showed the superior accuracy and reliability of image-based, robot-assisted bone augmentation. We have also modified a planning paradigm for femur augmentation to lower the injection volume as compared to the previous work . This will likely reduce the risk of thermal necrosis caused by exothermic polymerization of PMMA.
Status
Application demos for treatment of femoroplasty; prototype drilling and injection component exist; integrating robotic system components for OR application and cadaver studies; designing animal study for investigating the safety of the procedure