Accomplishment
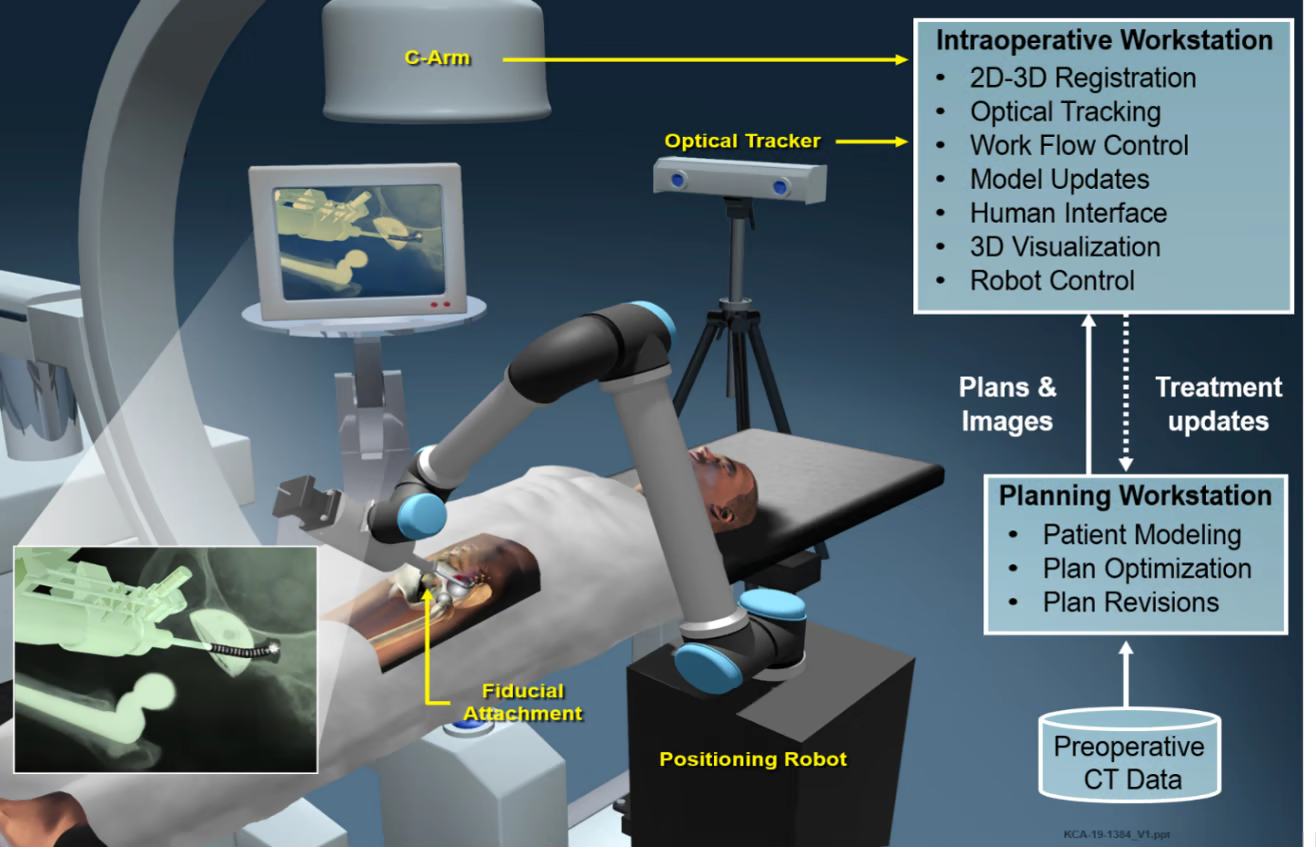
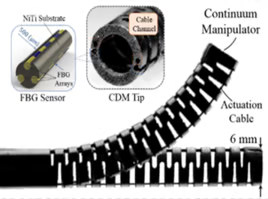
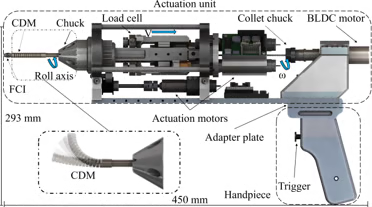
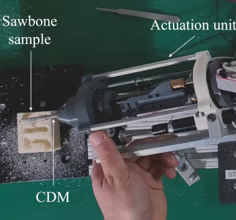
We are developing a suite of surgical tools for minimally invasive, robotic surgery of the hip, knee, and spine using a continuum manipulator. Our system is capable of autonomous, robot-assisted, and hand-held operation, allowing for the surgeon to configure the system to optimize for time, cost, and safety.


Status
We have successfully demonstrated autonomous treatment of osteolysis using feedback from an FBG sensor, as well as stable operation of the CDM for hand-held milling and drilling.
Publications
- S. Sefati, M. Armand, I. Iurdachita, “Data-Driven Collision Detection for Manipulator Arms,” U.S. Patent Application 20200338723 10/29/2020
- F. Alambeigi, R. Seifabadi, M. Armand, “Devices with Low Melting Point Alloy for Control of Device Flexibility,” U.S. Patent Application. 16872519, 09/03/2020
- F. Alambeigi, M. Armand, "Steerable Drill for Minimally-Invasive Surgery," ed: U.S. Patent App. 16/490,751, 2020
- M. Armand., M. Moses, M.D. Kutzer, J.E. Tiffany, “Adjustable-Stiffness Morphable Manipulator,” U.S. Patent No. US10259129, 4/16/2019
- I. Iordochita , L. Hao, M. Armand, R.H. Taylor, ”Shape Tracking of a Dexterous Continuum Manipulator, ” U.S. Patent No. 10 226304B2, Issued: 3/12/2019
- M. Armand, M. Kutzer, C. Brown, R.H. Taylor, “Cable-Driven Morphable Manipulator,“ Patent No US9737687, 22/8/2017